管道自动焊机-自动焊接机-自动焊接设备-览众科技
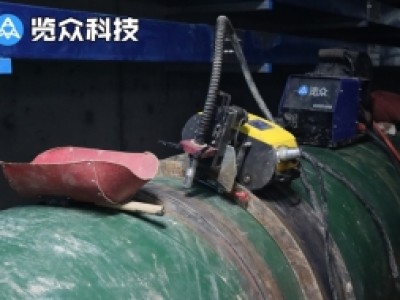
管道自动焊机-自动焊接机-自动焊接设备-览众科技 大家好,我是览众焊接机器人的小编,今天给大家介绍一下数控自动焊机,傻瓜式操作,所谓的数控自动焊机,傻瓜式操作其实是一种自动焊接设备,属于焊接机器人的一种。这种自动焊设备运用磁吸式焊接小车绕管爬行的自动焊接方法,数控自动焊机,傻瓜式操作实现了管道的全位置自动焊接,即平焊自动焊接、下向焊自动焊接、仰面自动焊接和向上自动焊接。
管道环缝焊接大多在现场施工现场进行,通常工作环境恶劣,劳动强度高,对焊工的技术要求高。 由于焊接工作非常艰苦,随着人口老龄化,国内外高级焊接技术人员短缺。览众现场施工管道焊接机器人的应用可以改善这些问题。它不仅可以作为多种焊接技术使用,而且可以快速批量生产,弥补了焊工培训时间长、焊接质量低的缺点。

当今的管道工业要求管道具有更高的输送压力和更大的管道直径,并确保其安全运行。 为了适应管线钢的高强度、高韧性、大直径和厚壁,出现了各种焊接方法、焊接材料和焊接工艺。

现场焊接位置为管道水平固定或倾斜固定对接,包括水平焊接、垂直焊接、顶焊、水平焊接等焊接位置。 因此,对焊工的操作技术提出了越来越高的要求。
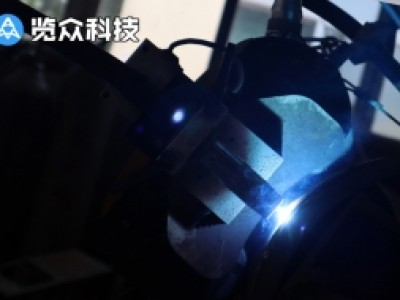
本发明满足现场施工管道焊接和现场施工管道焊接的要求。 本发明采用管道不动、氩弧焊小车绕管道旋转的焊接方式,可以实现全位置管道焊接的单面焊接和双面成型,满足各行业几乎严格的高质量焊接要求。
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
在我国的锅炉、压力容器和管道制造企业中,各种先进的高效焊接方法得到了推广和使用,并引进了大量现代焊接设备。焊接生产工艺达到了较高水平。为了满足对锅炉、压力容器和管道日益增长的需求,有必要进一步开发和推广生产效率更高的先进焊接方法和工艺。
在全位置管道焊接过程中,焊枪的位置不断变化。由于地球引力的影响,熔池在不同位置的表面张力差异很大。为了保证焊接质量,要求焊接参数随位置变化。览众现场施工管道自动焊接机的控制系统都增加了位置传感功能,可以一次实现各层焊接参数的自由设置和平滑过渡,即焊接专家库系统,同时向用户开放使用权限,用户可以在此平台上独立开发所需的焊接工艺。 所需的焊接参数预先预置在系统中,预置的焊接参数可以在施工现场打开直接调用,系统在焊接过程中实时调用设定的参数。 在确保焊缝形成一致的同时,也确保焊缝形成的美观。这一个细节功能,降低了操作者的学习难度,确保可以在短时间内学会焊接机器人的操作。
管径的增加和输送压力的增加都要求管道具有更高的强度。近年来,在保证焊接性和冲击韧性的前提下,管材的强度有了很大提高。由于管道铺设完全由焊接过程完成,焊接质量在很大程度上决定了工程质量,焊接是管道施工的关键环节 然而,管道、焊接材料、焊接工艺和焊接设备是影响焊接质量的关键因素。
以上就是给大家介绍有关数控自动焊机,傻瓜式操作的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。