览众科技:管道自动焊机-自动焊接机-自动焊接设备
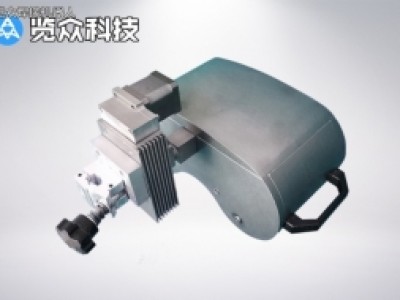
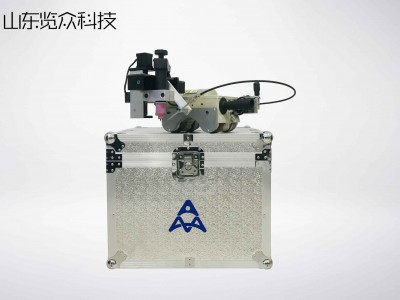
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下流体圆筒焊接设备,所谓的流体圆筒焊接设备其实是一种自动焊接设备,属于焊接机器人的一种。流体圆筒焊接设备运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
焊接,作为一种特殊的工作类型,特别是对于从事管道焊接的焊工来说,在所有的位置都是常见的,如高空焊接、高空垂直焊接、垂直焊接、垂直平板焊接和水平焊接,焊接十八般武艺更是样样高难度的,焊工承受着体力和能量的折磨。

当今的管道工业要求管道具有更高的输送压力和更大的管道直径,并确保其安全运行。 为了适应管线钢的高强度、高韧性、大直径和厚壁,出现了各种焊接方法、焊接材料和焊接工艺。

此外,除了一般的工业安全法规外,还应注意览众焊接机器人的特殊性,并采取相应的可靠对策。例如,在览众焊接机器人及其外围设备上安装安全围栏,以防止进入危险区域的人员造成意外伤害;或者在安全护栏入口处的安全门上设置插入式电接触开关。一旦安全门打开,机器人控制器将切断机器人的驱动电源,机器人将立即停止移动。
保护气体的选用。焊接用氩气纯度不应低于99.99%,露点不应高于-50℃,且符合GB4842-1984的规定。当瓶装氩气的压力低于0.5MPa时不宜使用。
编程技能总结(1)选择合理的焊接顺序。为了减少焊接变形和焊枪行走路径长度,制定了焊接顺序。(2)焊枪空间过渡要求短、平稳、安全的运动轨迹。(3)优化焊接参数。为了获得最佳焊接参数,制作了用于焊接试验和工艺评定的工作试样。
咬边产生原因:a、焊接电流太大,焊接电压太高;b、焊接速度过快,填丝太少;c、焊枪摆动不均匀。防止措施:a、适当的调整焊接电流和电弧电压;b、适当增加送丝速度或降低焊接速度;c、力求焊枪摆动均匀。
焊缝跟踪和偏差控制是实现焊接自动化的关键技术。 在环境信息采集过程中,视觉传感器具有信息量大、精度高、不与工件接触等优点。,具有良好的应用空间和前景。 根据不同的成像光源,视觉传感器可以分为主动视觉传感器和被动视觉传感器 无源视觉传感器使用摄像机直接获取视觉信息,无需辅助光源,具有抗干扰能力强、系统结构简单、成本低等优点。
自动焊前工艺要求:务必保证工件焊口平齐,剪切偏差不足容易造成焊接成形不良,工件焊缝端面须采用机床加工,去除加工毛刺,拼缝要求规则均匀, 需采用手工TIG氩弧焊点焊(不能加丝)对接并清理焊接区内的污物,组装对接间隙应最大不能超过1.5mm,错边量最大不能超过1.5mm,T字形接口在和筒体和封头对接时缝隙不能超过1.5mm, 8mm以下的不锈钢板和碳钢不开坡口,8mm以上的不锈钢和碳钢须开坡口焊接。
以上就是给大家介绍有关流体圆筒焊接设备的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。